App note from Vishay on galvanically isolating I2C bus by optocoupler. Link here (PDF)
The I2C bus, also known as inter-IC bus, is a bidirectional, two-wire, multi-user bus. It was developed by Philips Semiconductors to connect microcontrollers, EEPROMs, A/D and D/A converters, I/O interfaces, and other peripherals.
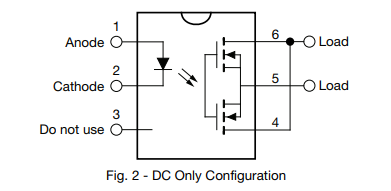
For optical isolation between master and slave, an optocoupler is the perfect solution. Due to galvanic isolation, an optocoupler helps to break up ground loops and reduces the electrical noise due to optical light transmission across an isolation barrier.
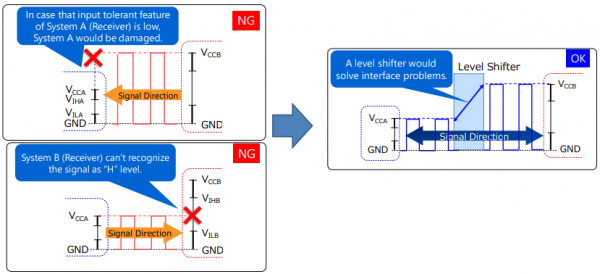
It can restore the logic level and can be used for signal level transforming between different voltage level domains, e.g. from 5 V to 3.3 V or 24 V.
One channel is required for the serial clock line (SCL) and two channels for the serial data line (SDA) to transmit the data from master to slave and back.