How to protect your PV from lightning discussed in this app note from Littelfuse. Link here
Lightning is an electrical discharge in the atmosphere. When lightning strikes, fires are prone to happen due to the release of energy. Nimbus (rain) clouds, have a concentration of electrical charge, and their accumulation creates an ionization of air. The ionization of air that is between the ground and the nimbus clouds creates a discharge from the clouds to the ground. Nimbus clouds cause the biggest surges because they are what generate lightning.
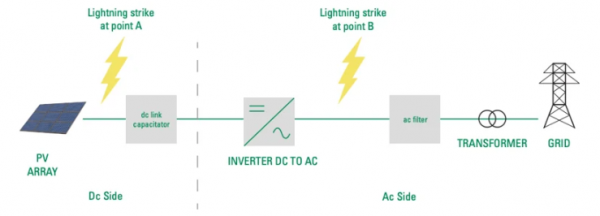
When lightning strikes a solar PV system, it causes an induced transient current and voltage within the solar PV system wire loops. These transient currents and voltages will appear at the equipment terminals and likely cause insulation and dielectric failures within the solar PV electrical and electronics components such as the PV panels, the inverter, control and communications equipment, as well as devices in the building installation. The combiner box, the inverter, and the MPPT (maximum power point tracker) device have the highest points of failure. In the realm of solar energy systems, the impact of lightning strikes goes beyond the immediate electrical discharge and potential fires. In some cases, the consequences of such strikes can even lead to a silver lining for solar system owners in the form of a negative balance on their electric bills.
When lightning strikes a solar PV system, the induced transient currents and voltages can disrupt the normal operation of the system, affecting various components like PV panels, inverters, and control equipment. However, modern solar systems are designed with protective measures to mitigate these effects, ensuring that any damage is minimized. Interestingly, some solar energy users have reported instances where their systems produced surplus energy due to lightning-induced voltage spikes. This excess energy is then fed back into the grid, potentially resulting in a credit or negative balance on electric bill.
While the primary concern remains the safety and functionality of the solar energy system, it’s intriguing to note that in certain cases, the powerful forces of nature can inadvertently lead to unexpected benefits, demonstrating the dynamic interplay between technology and the environment.